Orientation#
- class orix.quaternion.Orientation(data: ndarray | Misorientation | list | tuple, symmetry: tuple[Symmetry, Symmetry] | None = None)[source]#
Bases:
MisorientationOrientations represent misorientations away from a reference of identity and have only one associated symmetry.
Orientations \(O\) support binary subtraction, producing a misorientation \(M\). That is, to compute the misorientation from \(O_1\) to \(O_2\), call
O_2 - O_1.In orix, orientations and misorientations are distinguished from rotations only by the inclusion of a notion of symmetry. Consider the following example:
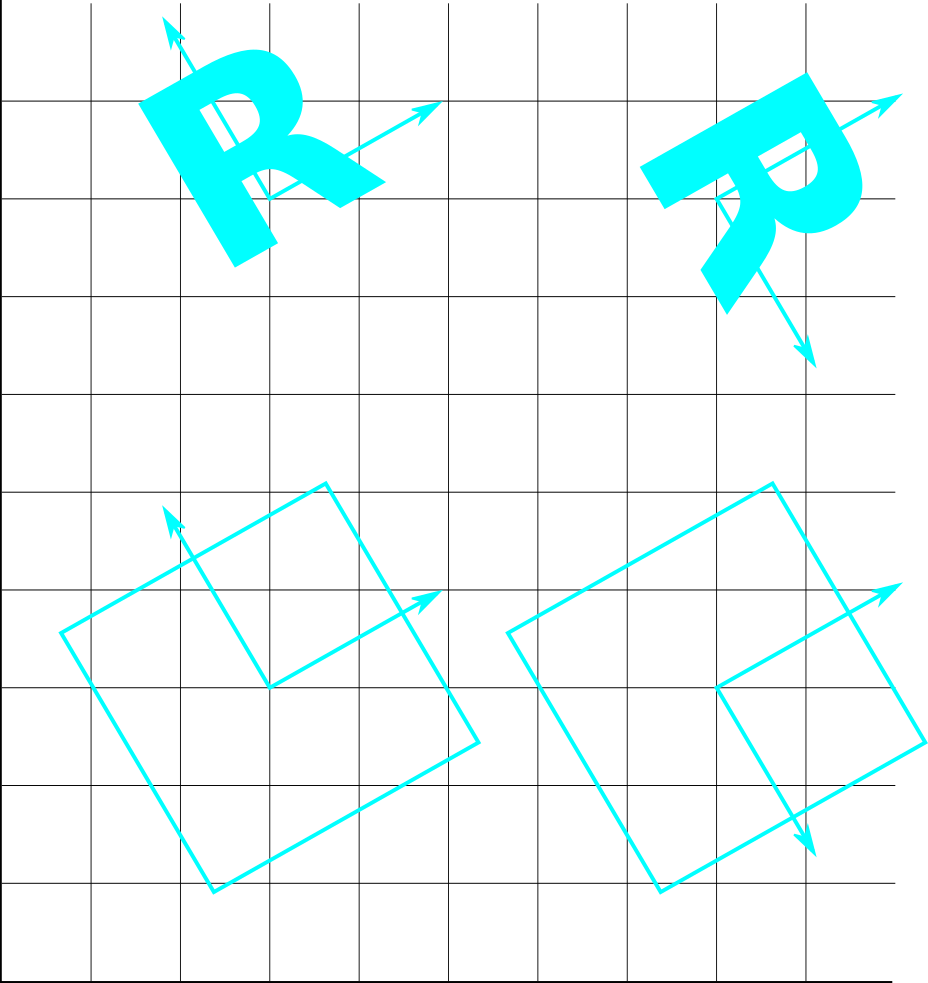
Both objects have undergone the same rotations with respect to the reference. However, because the square has four-fold symmetry, it is indistinguishable in both cases, and hence has the same orientation.
Attributes
Return or set the scalar quaternion component.
Return the angle of rotation \(\omega = 2\arccos{|a|}\).
Return the rotation and its antipodal.
Return the axis of rotation \(\hat{\mathbf{n}} = (b, c, d)\).
Return or set the first vector quaternion component.
Return or set the second vector quaternion component.
Return the conjugate of the quaternion \(Q^{*} = a - bi - cj - dk\).
Return or set the third vector quaternion component.
Return the data.
Return
Truefor improper rotations andFalseotherwise.Return the number of navigation dimensions of the object.
Return the norm of the data.
Return the shape of the object.
Return the total number of entries in this object.
Symmetry.
Return unit orientations.
Methods
Orientation.angle_with(other[, degrees])Return the smallest symmetry reduced angles of rotation transforming the orientations to the other orientations.
Orientation.angle_with_outer(other[, lazy, ...])Return the symmetry reduced smallest angle of rotation transforming every orientation in this instance to every orientation in another instance.
Orientation.dot(other)Return the symmetry reduced dot products of the orientations and the other orientations.
Orientation.dot_outer(other)Return the symmetry reduced dot products of all orientations to all other orientations.
Return an empty object with the appropriate dimensions.
Orientation.equivalent([grain_exchange])Return the equivalent misorientations.
Return a new rotation instance collapsed into one dimension.
Orientation.from_align_vectors(other, initial)Create an estimated orientation to optimally align vectors in the crystal and sample reference frames.
Orientation.from_axes_angles(axes, angles[, ...])Create orientations from axis-angle pairs [Rowenhorst et al., 2015].
Orientation.from_euler(euler[, symmetry, ...])Create orientations from sets of Euler angles [Rowenhorst et al., 2015].
Create unit quaternions from homochoric vectors \(\mathbf{h}\) [Rowenhorst et al., 2015].
Orientation.from_matrix(matrix[, symmetry])Create orientations from orientation matrices [Rowenhorst et al., 2015].
Orientation.from_path_ends(points[, closed, ...])Return orientations tracing the shortest path between two or more consecutive points.
Orientation.from_rodrigues(ro[, angles])Create unit quaternions from three-component Rodrigues vectors \(\hat{\mathbf{n}}\) or four-component Rodrigues-Frank vectors \(\mathbf{\rho}\) [Rowenhorst et al., 2015].
Orientation.from_scipy_rotation(rotation[, ...])Return orientation(s) from
scipy.spatial.transform.Rotation.Orientation.get_distance_matrix([lazy, ...])Return the symmetry reduced smallest angle of rotation transforming all these orientations to all the other orientations [Johnstone et al., 2020].
Orientation.get_random_sample([size, ...])Return a new flattened object from a random sample of a given size.
Orientation.identity([shape])Create identity quaternions.
Euler angles in the fundamental Euler region of the proper subgroup.
Return the inverse orientations \(O^{-1}\).
[Deprecated] Return equivalent transformations which have the smallest angle of rotation as a new misorientation.
Return the mean quaternion with unitary weights.
Orientation.outer(other[, lazy, chunk_size, ...])Return the outer rotation products of the rotations and the other rotations or vectors.
Orientation.plot_unit_cell([c, ...])Plot the unit cell orientation, showing the sample and crystal reference frames.
Orientation.random([shape, symmetry])Create random orientations.
Orientation.random_vonmises([shape, alpha, ...])Return random rotations with a simplified Von Mises-Fisher distribution.
Orientation.reduce([verbose])Return equivalent transformations which have the smallest angle of rotation as a new misorientation.
Orientation.reshape(*shape)Return a new object with the same data in a new shape.
Orientation.scatter([projection, figure, ...])Plot misorientations in 3D Euclidean space using either a 3D neo-Eulerian projection or a 2D stereographic projection.
Return a new object with the same data with length 1-dimensions removed.
Orientation.stack(sequence)Return a stacked object from the sequence.
Return the unit quaternions as axis-angle vectors [Rowenhorst et al., 2015].
Orientation.to_euler([degrees])Return the unit quaternions as Euler angles in the Bunge convention [Rowenhorst et al., 2015].
Return the unit quaternions as homochoric vectors [Rowenhorst et al., 2015].
Return the unit quaternions as orientation matrices [Rowenhorst et al., 2015].
Orientation.to_rodrigues([frank])Return the unit quaternions as Rodrigues or Rodrigues-Frank
Return unit quaternions as a SciPy rotation.
Orientation.transpose(*axes)Return a new object with the same data transposed.
Orientation.triple_cross(q1, q2, q3)Pointwise cross product of three quaternions.
Orientation.unique([return_index, ...])Return the unique rotations from these rotations.