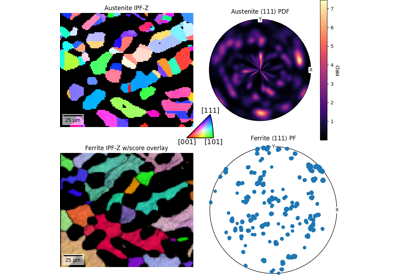
inv# Quaternion.inv() → Quaternion[source]# Return the inverse quaternions \(Q^{-1} = a - bi - cj - dk\). Examples using Quaternion.inv# Subplots Subplots