Symmetry#
- class orix.quaternion.Symmetry(data: ndarray | Rotation | list | tuple)[source]#
Bases:
RotationThe set of rotations comprising a point group.
An object’s symmetry can be characterized by the transformations relating symmetrically-equivalent views on that object. Consider the following shape.
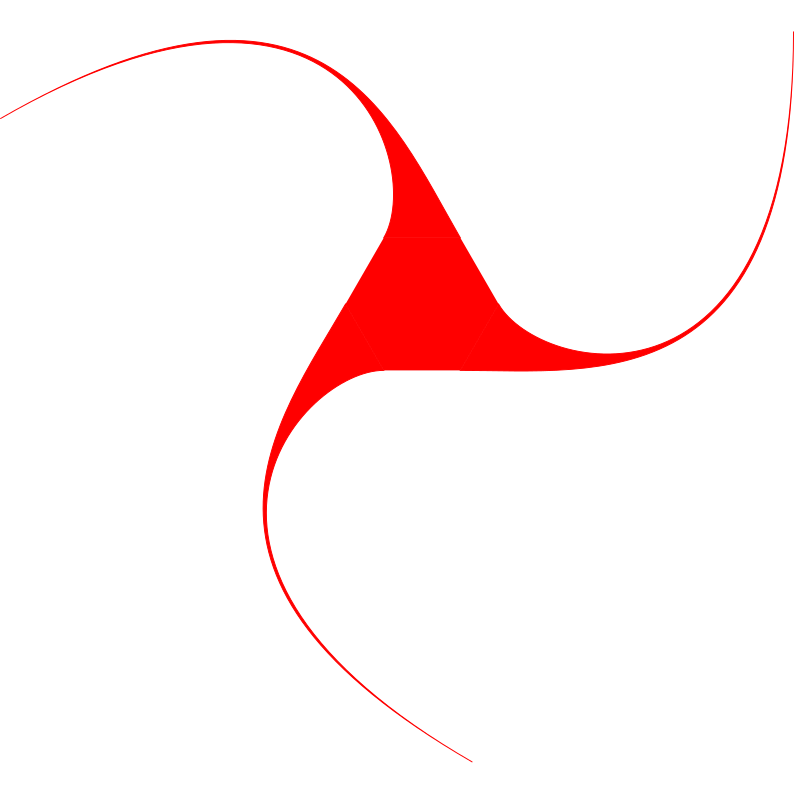
This obviously has three-fold symmetry. If we rotated it by \(\frac{2}{3}\pi\) or \(\frac{4}{3}\pi\), the image would be unchanged. These angles, as well as \(0\), or the identity, expressed as quaternions, form a group. Applying any operation in the group to any other results in another member of the group.
Symmetries can consist of rotations or inversions, expressed as improper rotations. A mirror symmetry is equivalent to a 2-fold rotation combined with inversion.
Attributes
Return or set the scalar quaternion component.
Return the angle of rotation \(\omega = 2\arccos{|a|}\).
Return the rotation and its antipodal.
Return the axis of rotation \(\hat{\mathbf{n}} = (b, c, d)\).
Return or set the first vector quaternion component.
Return or set the second vector quaternion component.
Return the conjugate of the quaternion \(Q^{*} = a - bi - cj - dk\).
Return whether this group contains inversion.
Return or set the third vector quaternion component.
Return the data.
Return the diads of this symmetry.
Return the fundamental Euler angle region of the proper subgroup.
Return the fundamental sector describing the inverse pole figure given by the point group name.
Return
Truefor improper rotations andFalseotherwise.Return whether this group contains only proper rotations.
Return this group plus inversion.
Return the proper subgroup of this group plus inversion.
Return the number of navigation dimensions of the object.
Return the norm of the data.
Return the number of elements of the group.
Return the largest proper group of this subgroup.
Return the list of proper groups that are subgroups of this group.
Return the shape of the object.
Return the total number of entries in this object.
Return the list groups that are subgroups of this group.
Return which of the seven crystal systems this symmetry belongs to, or None if the symmetry name is not recognized.
Return the unit object.
Methods
Symmetry.angle_with(other[, degrees])Return the angles of rotation transforming the rotations to the other rotations.
Symmetry.angle_with_outer(other[, degrees])Return the angles of rotation transforming the rotations to all the other rotations.
Symmetry.dot(other)Return the dot products of the quaternions and the other quaternions.
Symmetry.dot_outer(other)Return the outer dot products of the rotations and the other rotations.
Return an empty object with the appropriate dimensions.
Return a new rotation instance collapsed into one dimension.
Symmetry.from_align_vectors(other, initial)Estimate a quaternion to optimally align two sets of vectors.
Symmetry.from_axes_angles(axes, angles[, ...])Create unit quaternions from axis-angle pairs \((\hat{\mathbf{n}}, \omega)\) [Rowenhorst et al., 2015].
Symmetry.from_euler(euler[, direction, degrees])Create unit quaternions from Euler angle sets [Rowenhorst et al., 2015].
Symmetry.from_generators(*generators)Create a Symmetry from a minimum list of generating transformations.
Create unit quaternions from homochoric vectors \(\mathbf{h}\) [Rowenhorst et al., 2015].
Symmetry.from_matrix(matrix)Create unit quaternions from orientation matrices [Rowenhorst et al., 2015].
Symmetry.from_path_ends(points[, closed, steps])Return quaternions tracing the shortest path between two or more consecutive points.
Symmetry.from_rodrigues(ro[, angles])Create unit quaternions from three-component Rodrigues vectors \(\hat{\mathbf{n}}\) or four-component Rodrigues-Frank vectors \(\mathbf{\rho}\) [Rowenhorst et al., 2015].
Symmetry.from_scipy_rotation(rotation)Create unit quaternions from
scipy.spatial.transform.Rotation.Symmetry.get_random_sample([size, replace, ...])Return a new flattened object from a random sample of a given size.
Symmetry.identity([shape])Create identity quaternions.
Return the inverse rotations \(R^{-1}\).
Return the mean quaternion with unitary weights.
Symmetry.outer(other[, lazy, chunk_size, ...])Return the outer rotation products of the rotations and the other rotations or vectors.
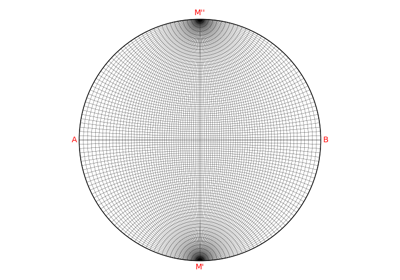
Symmetry.plot([orientation, ...])Stereographic projection of symmetry operations.
Symmetry.random([shape])Return uniformly distributed random data.
Symmetry.random_vonmises([shape, alpha, ...])Return random rotations with a simplified Von Mises-Fisher distribution.
Symmetry.reshape(*shape)Return a new object with the same data in a new shape.
Return a new object with the same data with length 1-dimensions removed.
Symmetry.stack(sequence)Return a stacked object from the sequence.
Return the unit quaternions as axis-angle vectors [Rowenhorst et al., 2015].
Symmetry.to_euler([degrees])Return the unit quaternions as Euler angles in the Bunge convention [Rowenhorst et al., 2015].
Return the unit quaternions as homochoric vectors [Rowenhorst et al., 2015].
Return the unit quaternions as orientation matrices [Rowenhorst et al., 2015].
Symmetry.to_rodrigues([frank])Return the unit quaternions as Rodrigues or Rodrigues-Frank
Return unit quaternions as a SciPy rotation.
Symmetry.transpose(*axes)Return a new object with the same data transposed.
Symmetry.triple_cross(q1, q2, q3)Pointwise cross product of three quaternions.
Symmetry.unique([return_index, ...])Return the unique rotations from these rotations.